53 Alternative Method for Calculating Torque and Tension*
If you would rather not think about finding lever arms, you can instead calculate the size of thetorque as the size of the force multiplied by the full distance to the pivot, and by the sine of the angle between the force and that full distance. Written in equation form it looks like this:
(1) 
Reinforcement Activity
The torque caused by a force depends on the angle between the line of action of the force acts and the line from where the force is applied to the pivot point. To feel this effect for yourself, try this:
Rotate a door by pushing at 90° to the door right at the outer edge.
Now apply the same force on the door, still on the very edge, but instead of pushing in a direction 90° to the door, push along the door, straight in toward the hinges. Does the door swing as it did before?
In the second case, the angle between the force direction and the distance to the pivot was 0° (they were parallel). Use the previous equation to show that the torque must be zero any time the line of action of the force goes straight through the rotation point (pivot).
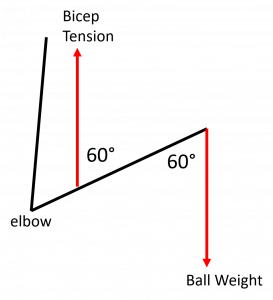
Now, we know the force is 50 lbs, the distance from the pivot to the weight is 13.0 in length of the forearm and from the diagram we see the angle between the weight of the ball and the forearm distance is 60° (the same as the bicep-forearm angle because they are alternate interior angles). This is easier to see if we draw a stick figure diagram:
Now we can calculate the torque due to the ball weight  as:
as:



We have calculated the torque on the forearm due to the weight of the ball. You may be used to hearing about torque in  rather than
rather than  , but we can always convert units later if we desire. For now, let’s keep working on finding the muscle tension.
, but we can always convert units later if we desire. For now, let’s keep working on finding the muscle tension.
We already know the torque due to the weight of the ball is  so we just need to make sure that the tension in the biceps is large enough to cause the same torque even though it acts closer to the pivot. The biceps muscle torque,
so we just need to make sure that the tension in the biceps is large enough to cause the same torque even though it acts closer to the pivot. The biceps muscle torque,  is:
is:

We just need to make this equal to the ball-weight-torque:

Then we divide both sides by  and
and  to isolate the bicep tension:
to isolate the bicep tension:

Finally we put in our values for and  . Our original diagram gave us the distance as from bicep attachment to the pivot as 1.5 in and from our stick diagram we can see that the angle between the biceps tension and the distance is 180°-60° = 120°. We are ready to find the biceps tension value.
. Our original diagram gave us the distance as from bicep attachment to the pivot as 1.5 in and from our stick diagram we can see that the angle between the biceps tension and the distance is 180°-60° = 120°. We are ready to find the biceps tension value.


Our result of 433 lbs seems surprisingly large, but we will see that forces even larger than this are common in the muscles, joints, and tendons of the body.
the result of a force applied to an object in such a way that the object would change its rotational speed, except when the torque is balanced by other torques
any interaction that causes objects with mass to change speed and/or direction of motion, except when balanced by other forces. We experience forces as pushes and pulls.
the central point, pin, or shaft on which a mechanism turns or oscillates
the force of gravity on on object, typically in reference to the force of gravity caused by Earth or another celestial body
the force that is provided by an object in response to being pulled tight by forces acting from opposite ends, typically in reference to a rope, cable or wire
