30 Measuring Body Weight
Springs
The predictable and repeatable way in which springs stretch in response to applied forces provides a method for measuring weight and other forces. Furthermore, springs can be designed to produce conveniently measurable stretch distances for a wide variety of forces. For example, if you were pull on each end of a steel wire that had the same diameter as a human hair, you would not be able to noticeably stretch the wire. However, if that rod were formed into a spring, then you could stretch the spring with your bare hands.
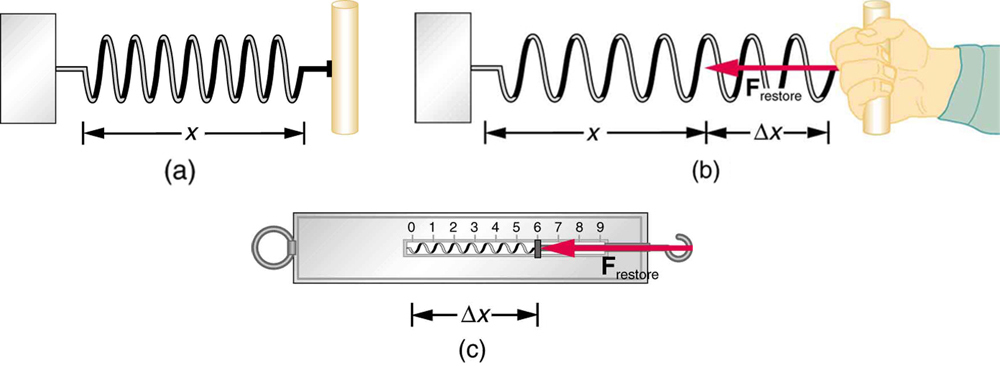
Springs follow Hooke's Law which states that the restoring force, FR exerted by the spring is equal to the stretch or compression distance, known as the displacement (Δx), multiplied by spring stiffness (k) and the direction of the force is opposite to the direction of the displacement.
(1) 
A higher spring stiffness means the spring shows a greater resistance to stretching or compressing. Spring stiffness is often called the spring constant. The negative sign tells us that the restoring force provided by the spring always points in the opposite direction as the displacement.
Check out this simulation of Hooke's Law:
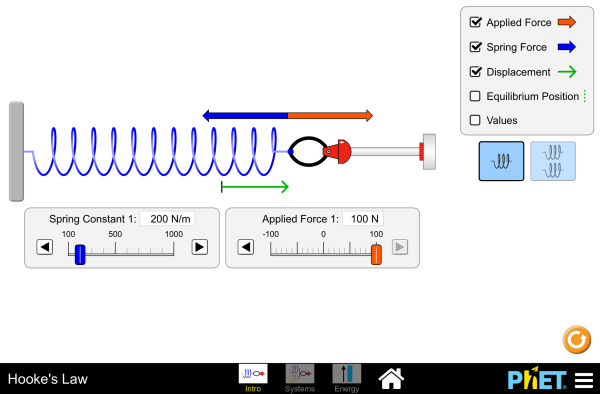
Reinforcement Activity
Vectors
As we analyze forces we are beginning to see that it’s very important to keep track of their directions in order to know if they are cancelling out or adding together, which is why we represent them with vectors. As we move through the textbook we will encounter a few other quantities that are also vectors and we will need to remember which quantities require keeping track of their direction (vectors) and which don’t (scalars). For example, the displacement of the spring is vector because is has a size that tells us how far it was displaced, and a direction that tells whether it was stretched or compressed that distance. We will make the symbols for vectors bold when writing equations. We should be able to avoid confusion with our bold units by only writing units behind numeric values and not behind symbols. You may have noticed that already started using this bold convention in the equation for the spring above. In some cases we might only be interested the size of a vector, called the magnitude, and then we will not make it bold.
Weight with a Spring Scale
Spring scales are designed to take advantage of Hooke's law to determine the size of the force stretching the spring by measuring the displacement. For example when hanging the object from the spring scale the force of gravity will pull it down and the restoring force in the spring pulls it up, as represented by the free body diagram of the turtle in the following image:
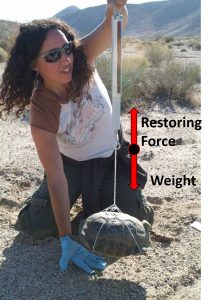
When weighing an object that is not in motion we know the restoring force from the spring must perfectly balance the weight because the object remains still, which is a state known as static equilibrium. In fact, anytime an object is at rest (a.k.a static) then all of the forces on the object must be perfectly balanced out, (a.k.a equilibrium). Therefore, if we are careful to make sure the object remains still we can measure the weight by finding the restoring force from the spring, which is determined by the displacement. Typically spring scales will have markings on them which indicate the restoring force for each stretch distance, so we don’t have to actually calculate the restoring force from the displacement every time we use the scale.
Many analog scales are based on multiple springs or the resistance to deformation by objects other than springs, but they still determine weight using measurement of a deformation combined with a known relation between deformation and force and an assumption of static equilibrium.
Reinforcement Exercises
Digital Scales
Many modern scales follow the same principle as spring scales, but instead of measuring the deformation directly, they measure an electric voltage created by a material in response to being deformed. Materials that produce voltages in response to deformation are known as piezoelectrics. As long as the relations between voltage and deformation and between deformation and applied force are both known, the scale can determine your weight by measuring a voltage.
An interesting aspect of the piezoelectric effect is reversibility, meaning that piezoelectric materials not only produce a voltage in response to deformation, they will also deform in response to an applied voltage, which allows for piezoelectric motors.
- OpenStax University Physics, University Physics Volume 1. OpenStax CNX. Sep 14, 2018 http://cnx.org/contents/d50f6e32-0fda-46ef-a362-9bd36ca7c97d@11.28. ↵
- "Paula Khan" by Neal Snyder via Wikimedia Commons released in the public domain by U.S. Army Environmental Command ↵
the restoring force exerted by a spring is equal to the displacement multiplied by spring constant
change in position, typically in reference to a change away from an equilibrium position or a change occurring over a specified time interval
measure of the stiffness of a spring, defined as the slope of the force vs. displacement curve for a spring
a quantity having direction as well as magnitude
the size or extent of a vector quantity, regardless of direction
any interaction that causes objects with mass to change speed and/or direction of motion, except when balanced by other forces. We experience forces as pushes and pulls.
attraction between two objects due to their mass as described by Newton's Universal Law of Gravitation
a force that tends to move a system back toward the equilibrium position
a graphical illustration used to visualize the forces applied to an object
the state being in equilibrium (no unbalanced forces or torques) and also having no motion
a state of having no unbalanced forces or torques
the ability of certain materials to generate an electric charge in response to applied mechanical stress

{kind=link}